| Channel | Publish Date | Thumbnail & View Count | Download Video |
|---|---|---|---|
 | Publish Date not found |  0 Views |
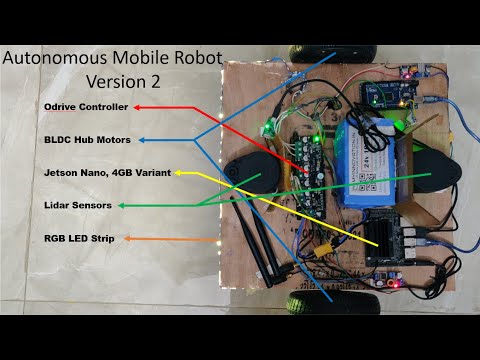
The most important update are the engines. These are BLDC HUB motors with hall encoders. These BLDC motors are controlled using an odrive controller.
The odometry is very accurate with the BLDC motors and ODrive controllers, which in turn make the robot's localization accurate.
The robot's brain is the same as in version 1. It is Jestson Nano, 4GB variant. All USB ports are occupied by lidars Odrive controller and Arduino.
Adrunio uses ros-serial to communicate with ros. It controls the LED strip that changes color based on the state of the robot.
I also added button interfaces to stop and start the robot while it moves toward a goal or waits at a waypoint.
The power source of the robot is a 24V-10AH li-ion battery.
Now coming to lidars, usually with larger robots it becomes a challenge to get a full 360 degree view using a single Lidar. So I used 2 Lidars, one at the front and one at the back to get the full 360 degree view around the robot.
My projects: https://github.com/bandasaikrishna/
ros_odrive: https://github.com/johnkok/ros_odrive
My website: https://www.rosroboticslearning.com/
Please take the opportunity to connect and share this video with your friends and family if you find it helpful.









