| Channel | Publish Date | Thumbnail & View Count | Download Video |
|---|---|---|---|
 Northwestern Robotics Northwestern Robotics | 2018-03-16 12:53:08 |  13,428 Views |
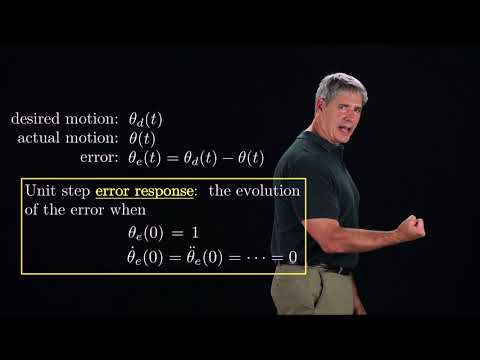
This video introduces the fault response for a controlled system and characterizes the fault response in terms of the steady-state error and the transient response (overshoot and settlement time).
This video is a brief summary of material from the book and is not intended to stand alone. For more details, such as an explanation of the notation, refer to the book and the other videos.
Playlist for Chapter 11: https://www.youtube.com/playlist?listPLggLP4f-rq02N54sD6xwdDWlDScvb32Pp
Playlist for all book videos: https://www.youtube.com/playlist?listPLggLP4f-rq02vX0OQQ5vrCxbJrzamYDfx
YouTube channel with all playlists: https://www.youtube.com/user/kevinl2145
Wiki for the book, including software and other supplements: http://modernrobotics.org
Modern Robotics is now a series of online courses on Coursera! https://www.coursera.org/specializations/modernrobotics
Please take the opportunity to connect and share this video with your friends and family if you find it helpful.









